Generate Images¶
This ipython notebook demonstrates how to generate an image dataset with rich ground truth from a virtual environment.
Load some python libraries The dependencies for this tutorials are PIL, Numpy, Matplotlib
from __future__ import division, absolute_import, print_function
import os, sys, time, re, json
import numpy as np
import matplotlib.pyplot as plt
imread = plt.imread
def imread8(im_file):
''' Read image as a 8-bit numpy array '''
im = np.asarray(Image.open(im_file))
return im
def read_png(res):
import StringIO, PIL.Image
img = PIL.Image.open(StringIO.StringIO(res))
return np.asarray(img)
def read_npy(res):
import StringIO
return np.load(StringIO.StringIO(res))
Connect to the game¶
Load unrealcv python client, do pip install unrealcv first.
from unrealcv import client
client.connect()
if not client.isconnected():
print('UnrealCV server is not running. Run the game downloaded from http://unrealcv.github.io first.')
Make sure the connection works well
res = client.request('vget /unrealcv/status')
print(res)
Out:
Is Listening
Client Connected
9000
Configuration
Config file: /home/unrealcv/LinuxNoEditor/RealisticRendering/Binaries/Linux/unrealcv.ini
Port: 9000
Width: 640
Height: 480
Load a camera trajectory¶
traj_file = './camera_traj.json' # Relative to this python script
import json; camera_trajectory = json.load(open(traj_file))
# We will show how to record a camera trajectory in another tutorial
Render an image¶
idx = 1
loc, rot = camera_trajectory[idx]
# Set position of the first camera
client.request('vset /camera/0/location {x} {y} {z}'.format(**loc))
client.request('vset /camera/0/rotation {pitch} {yaw} {roll}'.format(**rot))
# Get image
res = client.request('vget /camera/0/lit lit.png')
print('The image is saved to %s' % res)
# It is also possible to get the png directly without saving to a file
res = client.request('vget /camera/0/lit png')
im = read_png(res)
print(im.shape)
# Visualize the image we just captured
plt.imshow(im)
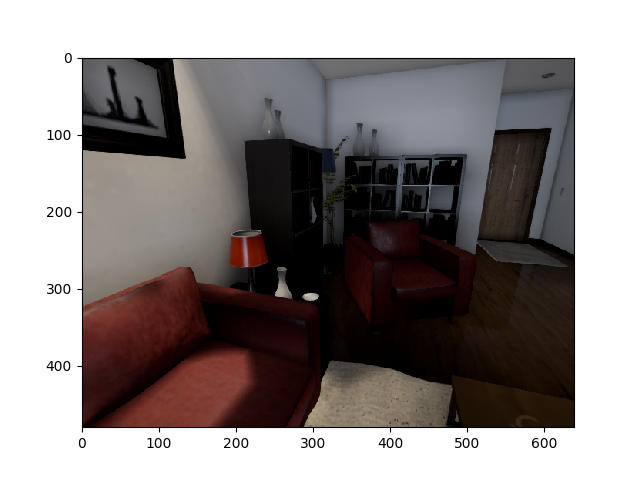
Out:
The image is saved to /home/unrealcv/LinuxNoEditor/RealisticRendering/Binaries/Linux/lit.png
(480, 640, 4)
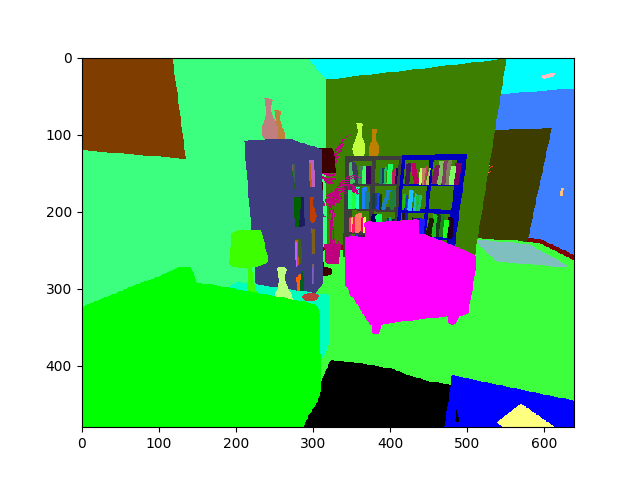
Ground truth generation¶
Generate ground truth from this virtual scene
res = client.request('vget /camera/0/object_mask png')
object_mask = read_png(res)
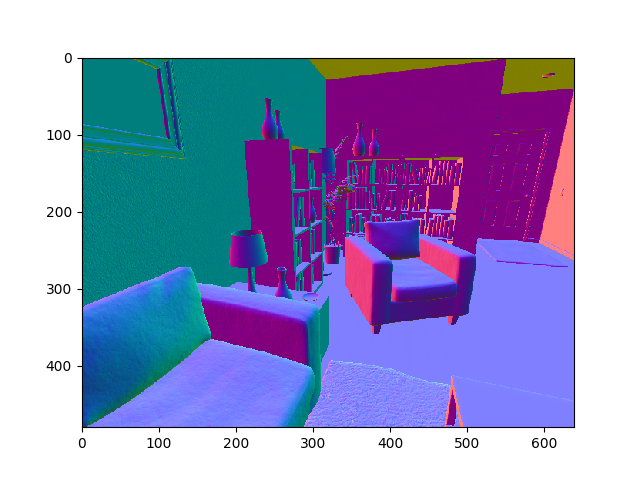
res = client.request('vget /camera/0/normal png')
normal = read_png(res)
# Visualize the captured ground truth
plt.imshow(object_mask)
plt.figure()
plt.imshow(normal)
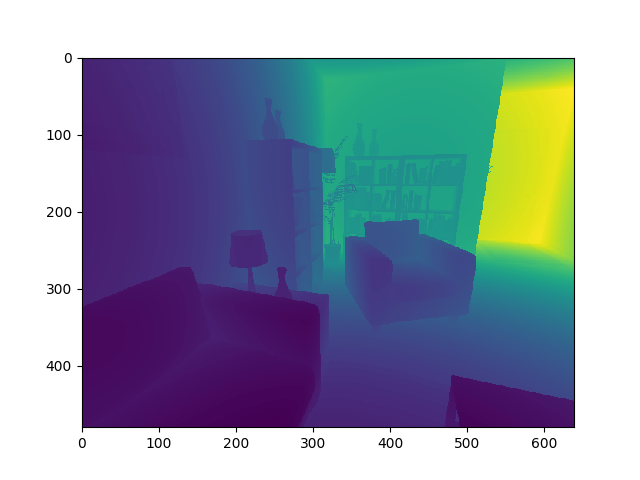
Depth is retrieved as a numpy array For UnrealCV < v0.3.8, the depth is saved as an exr file, but this has two issues. 1. Exr is not well supported in Linux 2. It depends on OpenCV to read exr file, which is hard to install
res = client.request('vget /camera/0/depth npy')
depth = read_npy(res)
plt.imshow(depth)
Get object information¶
List all the objects appeared in the virtual scene
scene_objects = client.request('vget /objects').split(' ')
print('There are %d objects in this scene' % len(scene_objects))
# TODO: replace this with a better implementation
class Color(object):
''' A utility class to parse color value '''
regexp = re.compile('\(R=(.*),G=(.*),B=(.*),A=(.*)\)')
def __init__(self, color_str):
self.color_str = color_str
match = self.regexp.match(color_str)
(self.R, self.G, self.B, self.A) = [int(match.group(i)) for i in range(1,5)]
def __repr__(self):
return self.color_str
color_mapping = {}
inverse_color_mapping = {}
num_objects = len(scene_objects)
for idx in range(num_objects):
objname = scene_objects[idx]
color = Color(client.request('vget /object/%s/color' % objname))
idx = color.R * 256 * 256 + color.G * 256 + color.B
color_mapping[objname] = idx
inverse_color_mapping[idx] = objname
if idx % (num_objects / 10) == 0:
sys.stdout.write('.')
sys.stdout.flush()
Out:
There are 296 objects in this scene
.
How many objects in this frame
mask = object_mask
mask_idx = mask[:,:,0] * 256 * 256 + mask[:,:,1] * 256 + mask[:,:,2]
unique_idx = list(set(mask_idx.flatten()))
print('There are %d objects in this image' % len(unique_idx))
obj_names = [inverse_color_mapping.get(k) for k in unique_idx]
print(obj_names)
Out:
There are 48 objects in this image
[None, 'Mug_30', 'Carpet_5', 'BookLP_142', None, 'BookLP_140', 'Couch_13', None, 'SM_Shelving_10', 'BookLP_141', None, None, 'SM_Railing_35', 'BookLP_176', None, 'SM_Railing_33', 'Switch_2', 'BookLP_104', 'SM_CoffeeTable_14', None, 'SM_Railing_34', None, 'SM_Shelving_9', None, None, 'SM_Shelving_8', None, None, None, None, None, None, None, None, None, 'BookLP_108', 'BookLP_106', 'EditorPlane_34', 'BookLP_144', None, 'SM_Room_7', None, 'BookLP_105', 'EditorPlane_24', None, 'EditorPlane_31', None, 'EditorPlane_25']
Show info of an object¶
Print an object
obj_idx = 0
obj_name = obj_names[obj_idx]
print('Show the object mask of %s' % obj_name)
mask = (mask_idx == unique_idx[obj_idx])
plt.imshow(mask)
Out:
Show the object mask of None
Clean up resources¶
client.disconnect()
Total running time of the script: ( 0 minutes 11.202 seconds)